Overview
v4l2av1dec is a hardware-accelerated video decoder that uses the Video4Linux2 (V4L2) stateful decoder API to offload AV1 video decoding to the Qualcomm Video Processing Unit (VPU).
This plugin is provided and maintained by the GStreamer community. This document focuses on its usage in conjunction with Qualcomm-specific QIM SDK GStreamer plugins, along with relevant use cases and internal architectural considerations.
v4l2av1dec is typically used to decode AV1 streams provided by:
- File sources (WebM, Matroska/MKV, MP4/ISOBMFF containers)
- RTSP sources
- HLS/HTTP streaming sources (e.g., YouTube AV1, streaming platforms)
matroskademux and av1parse).
Example Pipeline

Key Responsibilities
v4l2av1dec is responsible for:
- Hardware acceleration — offloads AV1 decoding to the dedicated VPU
- V4L2 state management — manages the V4L2 stateful decoder state machine (device open, buffer allocation, stream on/off)
- Buffer I/O management — handles buffer exchange between GStreamer and the V4L2 driver using DMABuf, MMAP, or UserPtr modes
- Format negotiation — negotiates raw output formats supported by the hardware, including UBWC-compressed formats (
NV12_Q08Cfor 8-bit SDR,NV12_Q10LE32Cfor 10-bit HDR) for reduced memory bandwidth - Multi-stream support — supports multiple concurrent decoder instances (subject to hardware resource limits)
- Error handling — supports decoder error controls such as
max-errorsand corrupted-frame discard behavior
Hierarchy
GObjectGstObject
GstElement
GstVideoDecoder
GstV4l2VideoDec
v4l2av1dec
Pad Templates
sink
| Capabilities | |
|---|---|
video/x-av1 | format: NA |
| Availability: Always | |
| Direction: sink |
src
| Capabilities | |
|---|---|
video/x-raw | format: { NV12_Q08C, NV12_Q10LE32C, NV12, NV21 } width: [1, 32768] height: [1, 32768] |
| Availability: Always | |
| Direction: source |
AV1 does not perform profile or level probing via V4L2 control enumeration in the current implementation. The sink caps are therefore unconstrained beyond the
video/x-av1 media type. Hardware capabilities are implicitly constrained by what the V4L2 driver accepts at runtime — if the driver does not support a particular AV1 profile or level, it will return an error during format negotiation (VIDIOC_S_FMT).Element Properties
| Property | Description |
|---|---|
automatic-request-sync-point-flags | Flags used when automatically requesting sync points.Type: FlagsDefault: 0x3 (corrupt-output+discard-input)Flags: readable/writable |
automatic-request-sync-points | Automatically requests sync points such as keyframes when useful, for example after decoding errors.Type: BooleanDefault: falseFlags: readable/writable |
capture-io-mode | I/O mode for the capture queue (src pad). Controls how decoded frame buffers are allocated and transferred.Type: Enum (GstV4l2IOMode)Default: 0, "auto"Flags: readable/writable |
device | The V4L2 device node path. Set automatically at registration time and read-only after element creation.Type: StringDefault: "/dev/video32"Flags: readable |
device-fd | File descriptor of the opened V4L2 device. A value of -1 indicates that the device is not open.Type: IntegerDefault: -1Flags: readable |
device-name | Human-readable name of the V4L2 device as reported by the driver via VIDIOC_QUERYCAP.Type: StringDefault: NULLFlags: readable |
discard-corrupted-frames | When enabled, frames marked as corrupted by the driver are dropped instead of passed downstream.Type: BooleanDefault: falseFlags: readable/writable |
extra-controls | Extra V4L2 controls (CIDs) to set on the device, specified as a GstStructure. Applied via VIDIOC_S_EXT_CTRLS.Type: GstStructureDefault: NULLFlags: readable/writable |
max-errors | Maximum number of consecutive decoder errors before the element returns a flow error. A value of -1 means unlimited.Type: IntegerDefault: -1Flags: readable/writable |
min-force-key-unit-interval | Minimum interval in nanoseconds between force-keyunit requests sent upstream. A value of 0 means no minimum interval.Type: Unsigned Integer64Default: 0Flags: readable/writable |
output-io-mode | I/O mode for the output queue (sink pad). Controls how compressed input buffers are submitted to the driver.Type: Enum (GstV4l2IOMode)Default: 0, "auto"Flags: readable/writable |
qos | Handles Quality-of-Service events from downstream. When enabled, the decoder may drop frames to maintain real-time playback.Type: BooleanDefault: trueFlags: readable/writable |
I/O Mode Values
Bothcapture-io-mode and output-io-mode accept the same GstV4l2IOMode enumeration:
| Value | Integer | Description |
|---|---|---|
auto | 0 | Automatically select the best I/O mode. Prefers DMABuf export for capture, MMAP for output. |
rw | 1 | Use read/write system calls. Rarely used for M2M devices. |
mmap | 2 | Use kernel memory-mapped buffers (V4L2_MEMORY_MMAP). |
userptr | 3 | Use user-space pointer buffers (V4L2_MEMORY_USERPTR). |
dmabuf | 4 | Export buffers as DMABuf file descriptors (V4L2_MEMORY_DMABUF). Enables zero-copy sharing with downstream GPU/display elements. |
dmabuf-import | 5 | Import DMABuf file descriptors from an external allocator into the V4L2 queue. |
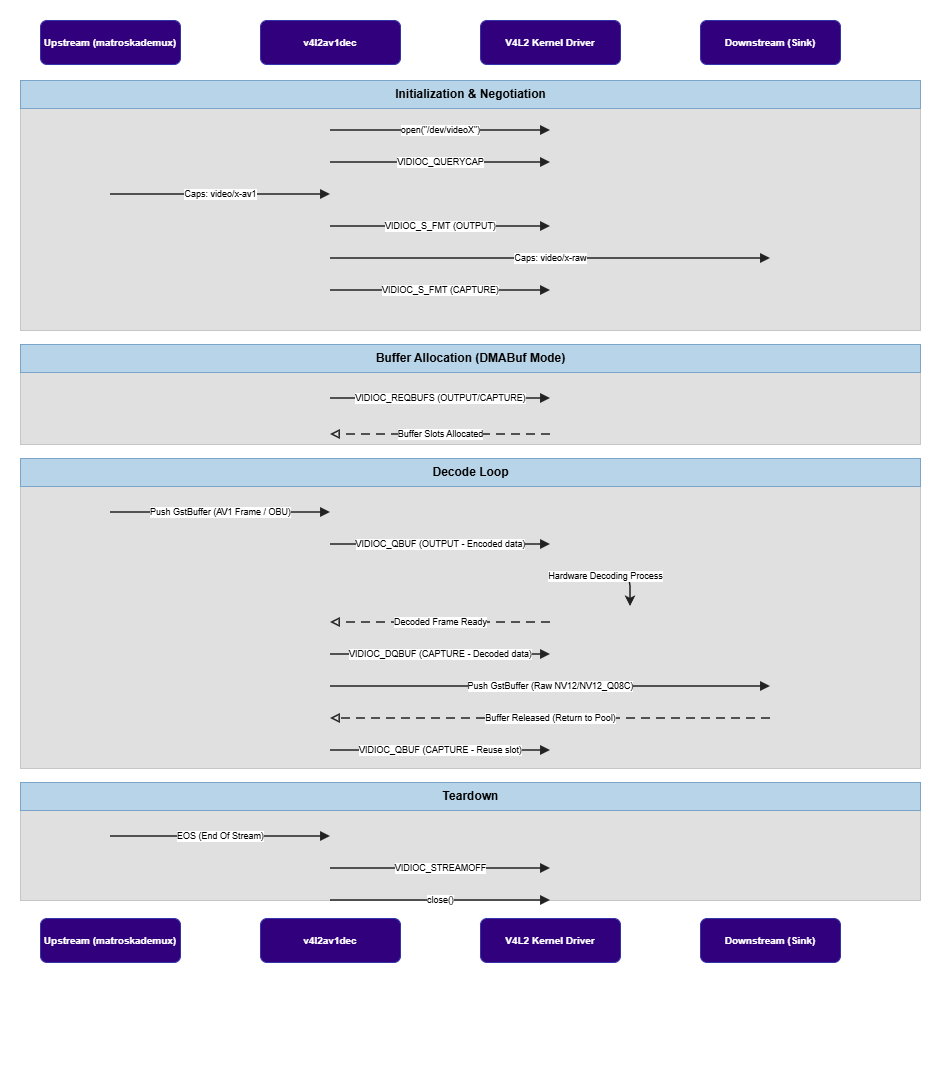
Internal Architecture
v4l2av1dec operates using two V4L2 queue objects internally:
- Output queue (
V4L2_BUF_TYPE_VIDEO_OUTPUT) — receives compressed AV1 OBU buffers from upstream - Capture queue (
V4L2_BUF_TYPE_VIDEO_CAPTURE) — produces decoded raw video frames for downstream
State Transitions
| Transition | Decoder Behavior | Notes |
|---|---|---|
NULL → READY | Element becomes ready. Static configuration available. | Configure capture-io-mode and output-io-mode before active decoding. |
READY → PAUSED | Decoder activates. V4L2 session setup begins. | Caps negotiation: sink is video/x-av1, src is video/x-raw (NV12/NV12_Q08C). AV1 OBU-aligned frames are expected — use av1parse upstream to ensure correct framing. |
PAUSED → PLAYING | Continuous decode starts. | With capture-io-mode=4 and output-io-mode=4, pipeline is configured for DMABuf zero-copy. |
PLAYING → PAUSED | Decoding paused at GStreamer scheduling level. | No full decoder teardown. Resume continues from current position. |
PLAYING/PAUSED → READY | Decoder stops. V4L2 streaming stopped, buffers released. | Key cleanup transition. |
READY → NULL | Element fully shut down. All resources released. | |
| EOS while PLAYING | Decoder drains pending input, outputs remaining frames, then forwards EOS. | |
| FLUSH | Current decode interrupted. Queued buffers discarded. | Common during seek or pipeline reset. Decoder waits for new AV1 intra-only (keyframe) after flush. |
Dynamic Resolution Change
v4l2av1dec supports mid-stream dynamic resolution changes without requiring a pipeline restart, handled through the V4L2 source change event mechanism:
- At initialization, the decoder subscribes to
V4L2_EVENT_SOURCE_CHANGEevents on the capture queue. - When the driver detects a resolution change in the bitstream (e.g., a new AV1 sequence header with different frame dimensions), it signals the event.
- The decoder stops the capture queue, discards the existing buffer pool, re-negotiates format via
VIDIOC_G_FMT, sets a new output state with updated dimensions, and reallocates the capture buffer pool.
Memory and Buffer Management
DMABuf Usage
Settingcapture-io-mode=4 exports decoded frame buffers as DMABuf file descriptors. These can be imported directly by waylandsink or qtivcomposer without CPU memory copies, enabling zero-copy pipelines.
Alignment Requirements
Decoded buffers follow Qualcomm hardware alignment requirements (e.g., 128-byte stride alignment).Format Support
Standard NV12 is common. UBWC (Universal Bandwidth Compression) is supported through:NV12_Q08C— 8-bit SDR contentNV12_Q10LE32C— 10-bit HDR content (HDR10, HDR10+, HLG)
NV12_Q10LE32C when the downstream element supports it.
Codec Header Initialization
Before the first frame is decoded, the decoder sends the AV1 sequence header OBU (Open Bitstream Unit) to the output queue. If the input caps containcodec_data (e.g., from the av1C configuration record in MP4/ISOBMFF containers), that data is sent first. Otherwise, the first input buffer itself is used as the initialization data.
Latency
The decoder computes and reports pipeline latency based on the minimum number of capture buffers required by the driver and the frame duration:Drain and Flush
- Drain — sends
V4L2_DEC_CMD_STOPto signal end-of-stream; waits for all remaining frames to be produced - Flush — stops both queues, resets buffer pools, and restarts streaming; used during seek operations
Usage
Ensure you have followed the prerequisites before continuing
Decode AV1 from a WebM File and Display
Demonstrates hardware-accelerated AV1 decoding from a WebM file with DMABuf zero-copy for Wayland preview.
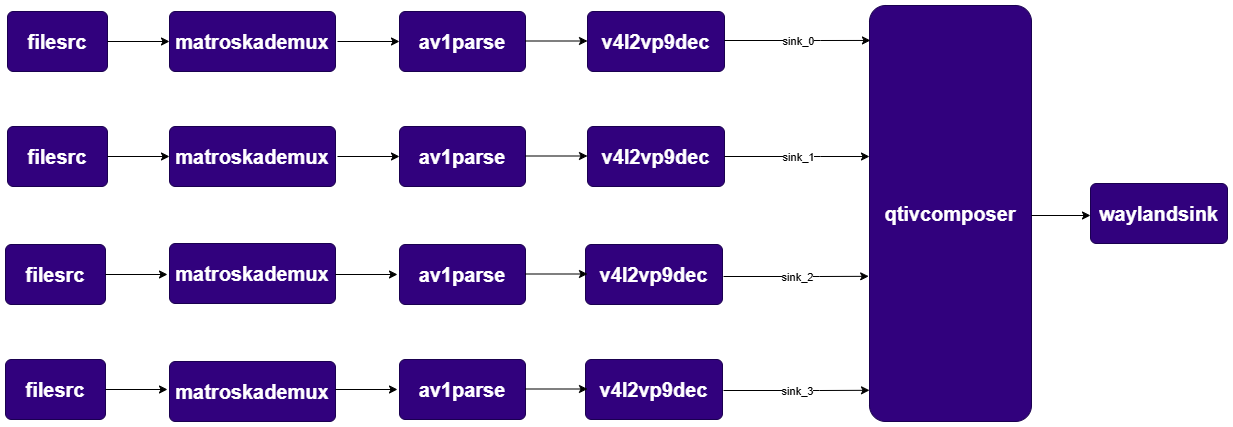
Four-Stream Side-by-Side Composition
Demonstrates decoding four AV1 input streams using four hardware decoder instances, arranging them in a 2×2 grid usingqtivcomposer, and displaying the composed frame.