Object detection
Ensure you have QIMSDK installed. QIM SDK Installation Guide
Prerequisites
Run these commands on your device first:Set environment variables
Set environment variables
Download the label, model, and video file
Download the label, model, and video file
Option 1. Run prebuilt application for object detection on device
Ensure you have followed the prerequisites before continuing
This is made possible by many blocks (plugins) working together to form a
pipeline. Let’s run the same example, but this time, in a way you can see all the plugins at work.
Option 2. Object detection pipeline command
Ensure you have followed the prerequisites before continuing
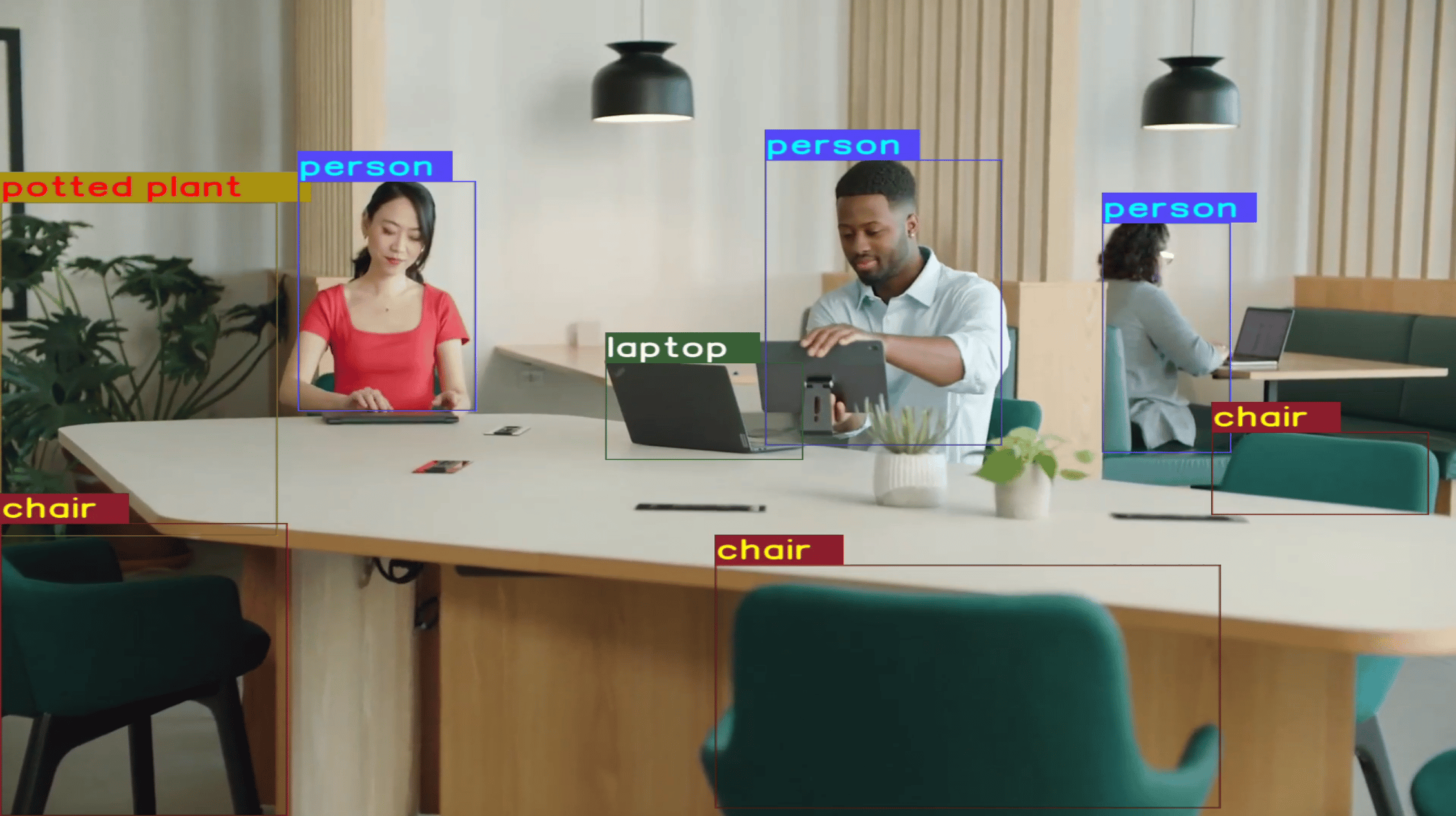
View results
Your display shows the video feed with bounding boxes and class labels rendered over each detected object. The pipeline processes frames in real time
Press
Press
Ctrl+C to stop the pipeline gracefully.- In case you want to build around this demo, command line might not be the most robust solution
- You could paste it into a shell file…
- But if you want other code to interact with this, you would want a cpp or python file (pipeline application).
Option 3. Build your object detection pipeline application with Python
Ensure you have followed the prerequisites before continuing
Option 4. Build your object detection pipeline application with C++
Go to Building AI PipelinesHow it works
The pipeline reads an H.264 video file, hardware-decodes it, branches the decoded stream, runs YOLO-X inference on the Qualcomm® AI Engine (HTP backend), post-processes the bounding-box results, blends the annotations back onto the original frame using a hardware compositor, and displays the output to a screen. Pipeline Diagram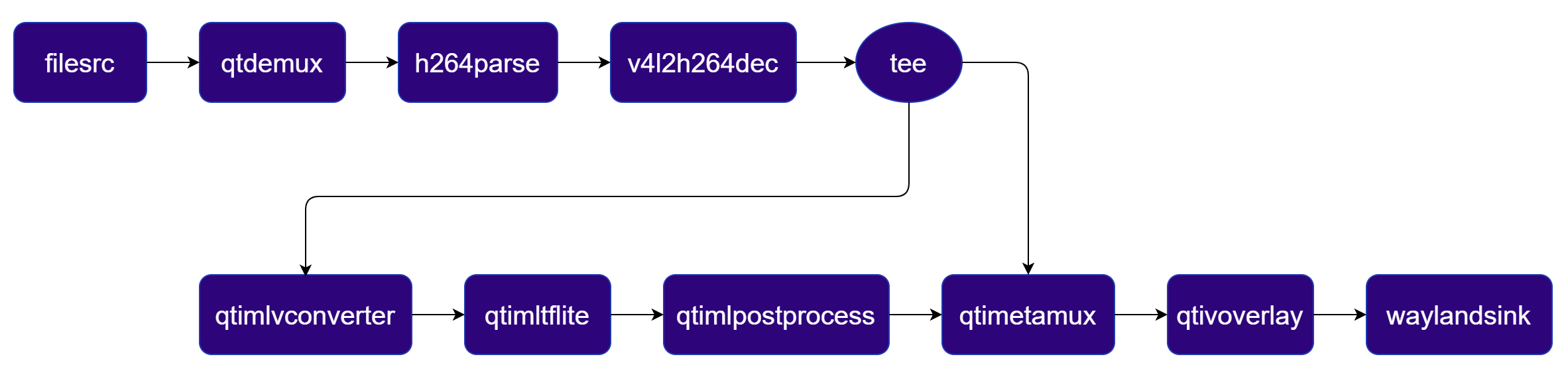
Next Steps
You’ve run an object detection pipeline in three different ways on Qualcomm® hardware. Here’s where to go next:AI Sample Pipelines
Ready-to-run GStreamer pipelines for classification, segmentation, pose estimation, super resolution, and more.
Blogs
Real-world examples built by the QIM SDK community — covering object detection, PPE compliance, security cameras, and more.
Supported Models
Full catalogue of quantized TFLite models tested on Qualcomm® hardware, with pipeline commands for each.
Plugin Reference
API-level documentation for every QIM SDK GStreamer plugin — properties, caps, and usage examples.